-
1 состояние блока
oil&gas: block status -
2 предыдущее состояние блока
oil&gas: previous block statusУниверсальный русско-английский словарь > предыдущее состояние блока
-
3 состояние
condition
- (вещества) — state
- (самолета или двигателя, графа раздела формуляра) — status today
- готовности (к срабатыванию, загоранию) — armed condition. the light is armed only when the switch is on.
- готовности (системы к работе) — (system) operational status. the mode select unit indicates the operational status of the system (by illumination of the ready lamp)
- летной годности (ла) — flyable status, airworthiness
- (самолета или двигателя) на данное время — status of (the airplane) at any particular time
- отказа — failure status
-, рабочее (выполнение определенных функций, работа, режим) — operating condition
-, рабочее (пригодность к эксплуатации) — operational status. cheek status of all anti-ice systems and turn off those systems which are not needed.
-, техническое — operational status
- эксплуатационной готовности (ла) — (aircraft) operational availability
the phased maintenance checks will increase airplane operational availability.
пo с. на (1 янв. 1983 г.) — at of jan 1, 1983
осмотр с целью определения состояния (изделия) — inspection (of unit) for condition
приводить (ла) в с. летной годности (напр., после ремонта) — return the aircraft to flyable status
проверять с. (блока, агрегата) — check (unit) for condition, check the condition of (unit)
содержать в исправном с. — maintain in serviceable conditionРусско-английский сборник авиационно-технических терминов > состояние
-
4 состояние базисного функционального блока
Programming: state of basic function blockУниверсальный русско-английский словарь > состояние базисного функционального блока
-
5 состояние измерительного блока расходомера
Engineering: flow readout box conditionУниверсальный русско-английский словарь > состояние измерительного блока расходомера
-
6 отказ (функционального блока)
отказ
Прекращение способности функционального блока выполнять необходимую функцию.
Примечания
1. Определение в МЭС 191-04-01 является идентичным, с дополнительными комментариями [ИСО/МЭК 2382-14-01-11].
2. Соотношение между сбоями и отказами в МЭК 61508 и МЭС 60050(191) см. на рисунке.
3. Характеристики требуемых функций неизбежно исключают определенные режимы работы, некоторые функции могут быть определены путем описания режимов, которых следует избегать. Возникновение таких режимов представляет собой отказ.
4. Отказы являются либо случайными (в аппаратуре), либо систематическими (в аппаратуре или в программном обеспечении).
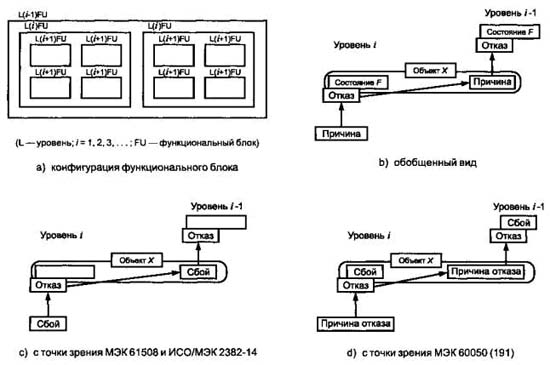
Рис. Модель отказа
Примечания
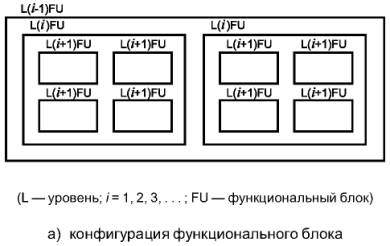
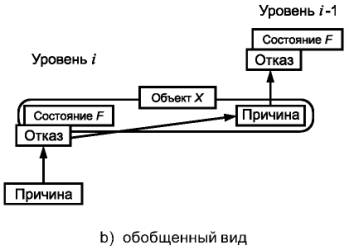
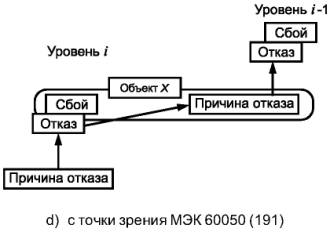
1. Как показано на рисунке а), функциональный блок может быть представлен в виде многоуровневой иерархической конструкции, каждый из уровней которой может быть, в свою очередь, назван функциональным блоком. На уровне i «причина» может проявить себя как ошибка (отклонение от правильного значения или состояния) в пределах функционального блока, соответствующего данному уровню i. Если она не будет исправлена или нейтрализована, эта ошибка может привести к отказу данного функционального блока, который в результате перейдет в состояние F, в котором он более не может выполнять необходимую функцию (см. рисунок b)). Данное состояние F уровня i может в свою очередь проявиться в виде ошибки на уровне функционального блока i - 1, которая, если она не будет исправлена или нейтрализована, может привести к отказу функционального блока уровня i - 1.
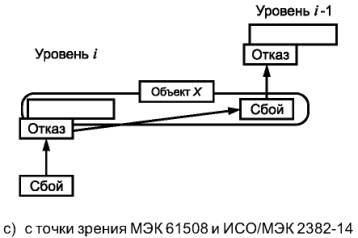
2. В этой причинно - следственной цепочке один и тот же элемент («объект X ») может рассматриваться как состояние F функционального блока уровня i, в которое он попадает в результате отказа, а также как причина отказа функционального блока уровня i - 1. Данный «объект X » объединяет концепцию «отказа» в МЭК 61508 и ИСО/МЭК 2382-14, в которой внимание акцентируется на причинном аспекте, как показано на рисунке c), и концепцию «отказа» из МЭС 60050(191), в которой основное внимание уделено аспекту состояния, как показано на рисунке d). В МЭС 60050(191) состояние F называется отказом, а в МЭК 61508 и ИСО/МЭК 2382-14 оно не определено.
3. В некоторых случаях отказ или ошибка могут быть вызваны внешним событием, таким как молния или электростатические помехи, а не внутренним отказом. Более того, ошибка (в обоих словарях) может возникать без предшествующего отказа. Примером такой ошибки может быть ошибка проектирования.
[ ГОСТ Р МЭК 61508-4-2007]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > отказ (функционального блока)
-
7 блокировка в звеньевой структуре коммутационного поля коммутационного блока (станции)
блокировка в звеньевой структуре коммутационного поля коммутационного блока (станции)
Состояние коммутационного поля коммутационного блока (станции), при котором соединение конкретного входа с требуемым свободным выходом невозможно из-за занятости промежуточных линий к этому выходу.
Примечание
Если в коммутационном поле существует вероятность блокировки, такая структура называется блокирующей, в противном случае структура называется не блокирующей.
[ ГОСТ 19472-88]Тематики
EN
116. Блокировка в звеньевой структуре коммутационного поля коммутационного блока (станции)
Call congestion
Состояние коммутационного поля коммутационного блока (станции), при котором соединение конкретного входа с требуемым свободным выходом невозможно из-за занятости промежуточных линий к этому выходу
Примечание. Если в коммутационном поле существует вероятность блокировки, такая структура называется блокирующей, в противном случае структура называется неблокирующей
Источник: ГОСТ 19472-88: Система автоматизированной телефонной связи общегосударственная. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > блокировка в звеньевой структуре коммутационного поля коммутационного блока (станции)
-
8 время переключения модуля (блока) СВЧ
время переключения модуля (блока) СВЧ
время переключения
tпрк
Интервал времени с момента включения (выключения) управляющего сигнала до момента перехода модуля (блока) СВЧ в другое состояние, определяемое по заданному уровню отсчета.
[ ГОСТ 23221-78]Тематики
Обобщающие термины
- модули СВЧ, блоки СВЧ
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > время переключения модуля (блока) СВЧ
-
9 текущее состояние диаграммы ECC
Programming: current state of ECC diagram (диаграммы управления выполнением базисного функционального блока IEC 61499)Универсальный русско-английский словарь > текущее состояние диаграммы ECC
-
10 индикатор состояния
1. state display2. status display3. status indicatorРусско-английский большой базовый словарь > индикатор состояния
-
11 отказ
отказ
Нарушение способности оборудования выполнять требуемую функцию.
Примечания
1. После отказа оборудование находится в неисправном состоянии.
2. «Отказ» является событием, в отличие от «неисправности», которая является состоянием.
3. Это понятие, как оно определено, не применяют коборудованиюобъекту, состоящему только из программных средств.
4. На практике термины «отказ» и «неисправность» часто используют как синонимы.
[ГОСТ ЕН 1070-2003]
[ ГОСТ Р ИСО 13849-1-2003]
[ ГОСТ Р МЭК 60204-1-2007]
отказ
Событие, заключающееся в нарушении работоспособного состояния объекта.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
[СО 34.21.307-2005]
отказ
Событие, заключающееся в нарушении работоспособного состояния машины и (или) оборудования вследствие конструктивных нарушений при проектировании, несоблюдения установленного процесса производства или ремонта, невыполнения правил или инструкций по эксплуатации.
[Технический регламент о безопасности машин и оборудования]EN
failure
the termination of the ability of an item to perform a required function
NOTE 1 – After failure the item has a fault.
NOTE 2 – "Failure" is an event, as distinguished from "fault", which is a state.
NOTE 3 – This concept as defined does not apply to items consisting of software only.
[IEV number 191-04-01]
NOTE 4 - In practice, the terms fault and failure are often used synonymously
[IEC 60204-1-2006]FR
défaillance
cessation de l'aptitude d'une entité à accomplir une fonction requise
NOTE 1 – Après défaillance d'une entité, cette entité est en état de panne.
NOTE 2 – Une défaillance est un passage d'un état à un autre, par opposition à une panne, qui est un état.
NOTE 3 – La notion de défaillance, telle qu'elle est définie, ne s'applique pas à une entité constituée seulement de logiciel.
[IEV number 191-04-01]Тематики
- безопасность в целом
- безопасность гидротехнических сооружений
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
DE
FR
отказ (failure): Событие, заключающееся в нарушении работоспособного состояния объекта
[ ГОСТ 27.002-89, статья 3.3].
Источник: ГОСТ Р 52527-2006: Установки газотурбинные. Надежность, готовность, эксплуатационная технологичность и безопасность оригинал документа
3.5 отказ (failure): Прекращение способности элемента исполнять требуемую функцию.
Примечания
1 После отказа элемент становится неисправным.
2 Отказ является событием в отличие от неисправности, которая является состоянием.
Источник: ГОСТ Р 51901.5-2005: Менеджмент риска. Руководство по применению методов анализа надежности оригинал документа
3.3. Отказ
Failure
Событие, заключающееся в нарушении работоспособного состояния объекта
Источник: ГОСТ 27.002-89: Надежность в технике. Основные понятия. Термины и определения оригинал документа
3.4 отказ (failure): Утрата изделием способности выполнять требуемую функцию.
Примечание - Отказ является событием в отличие от неисправности, которая является состоянием.
Источник: ГОСТ Р ИСО 13379-2009: Контроль состояния и диагностика машин. Руководство по интерпретации данных и методам диагностирования оригинал документа
3.2 отказ (failure): Утрата объектом способности выполнять требуемую функцию1).
___________
1) Более детально см. [1].
Источник: ГОСТ Р 51901.12-2007: Менеджмент риска. Метод анализа видов и последствий отказов оригинал документа
3.29 отказ (failure): Событие, происходящее с элементом или системой и вызывающее один или оба следующих эффекта: потеря элементом или системой своих функций или ухудшение работоспособности до степени существенного снижения безопасности установки, персонала или окружающей среды.
Источник: ГОСТ Р 54382-2011: Нефтяная и газовая промышленность. Подводные трубопроводные системы. Общие технические требования оригинал документа
3.1.3 отказ (failure): Потеря объектом способности выполнять требуемую функцию.
Примечания
1. После отказа объект имеет неисправность.
2. Отказ - это событие в отличие от неисправности, которое является состоянием.
3. Данное понятие по определению не касается программного обеспечения в чистом виде.
[МЭК 60050-191 ][1]
Источник: ГОСТ Р 50030.5.4-2011: Аппаратура распределения и управления низковольтная. Часть 5.4. Аппараты и элементы коммутации для цепей управления. Метод оценки рабочих характеристик слаботочных контактов. Специальные испытания оригинал документа
1. Отказ - событие, заключающееся в нарушении работоспособного состояния конструкций, зданий и сооружений.
2. Обследование конструкций - комплекс изыскательских работ по сбору данных о техническом состоянии конструкций, необходимых для оценки технического состояния и разработки проекта восстановления их несущей способности, усиления или реконструкции.
3.5 отказ (failure): Неспособность конструкции, системы или компонента функционировать в пределах критериев приемлемости.
[Глоссарий МАГАТЭ по безопасности, издание 2.0, 2006]
Примечание 1 - Отказ - это результат неисправности аппаратных средств, дефекта программного обеспечения, неисправности системы или ошибки оператора, связанной с ними сигнальной траекторией, которая и вызывает отказ.
Примечание 2 - См. также «дефект», «отказ программного обеспечения».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.3 отказ (failure): Утрата изделием способности выполнять требуемую функцию.
Примечание - Обычно отказ является следствием неисправности одного или нескольких узлов машины.
Источник: ГОСТ Р ИСО 17359-2009: Контроль состояния и диагностика машин. Общее руководство по организации контроля состояния и диагностирования оригинал документа
3.16 отказ (failure): Отклонение реального функционирования от запланированного. [МЭК 61513, пункт 3.21, изменено]
Источник: ГОСТ Р МЭК 60880-2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А оригинал документа
3.6.4 отказ (failure): Прекращение способности функционального блока выполнять необходимую функцию.
Примечания
1. Определение в МЭС 191-04-01 является идентичным, с дополнительными комментариями [ИСО/МЭК 2382-14-01-11].
2. Соотношение между сбоями и отказами в МЭК 61508 и МЭС 60050(191) см. на рисунке 4.
3. Характеристики требуемых функций неизбежно исключают определенные режимы работы, некоторые функции могут быть определены путем описания режимов, которых следует избегать. Возникновение таких режимов представляет собой отказ.
4. Отказы являются либо случайными (в аппаратуре), либо систематическими (в аппаратуре или в программном обеспечении), см. 3.6.5 и 3.6.6.
Примечания
1. Как показано на рисунке 4а), функциональный блок может быть представлен в виде многоуровневой иерархической конструкции, каждый из уровней которой может быть, в свою очередь, назван функциональным блоком. На уровне i «причина» может проявить себя как ошибка (отклонение от правильного значения или состояния) в пределах функционального блока, соответствующего данному уровню i. Если она не будет исправлена или нейтрализована, эта ошибка может привести к отказу данного функционального блока, который в результате перейдет в состояние F, в котором он более не может выполнять необходимую функцию (см. рисунок 4b)). Данное состояние F уровня i может в свою очередь проявиться в виде ошибки на уровне функционального блока i - 1, которая, если она не будет исправлена или нейтрализована, может привести к отказу функционального блока уровня i - 1.
2. В этой причинно-следственной цепочке один и тот же элемент («объект X») может рассматриваться как состояние F функционального блока уровня i, в которое он попадает в результате отказа, а также как причина отказа функционального блока уровня i - 1. Данный «объект X» объединяет концепцию «отказа» в МЭК 61508 и ИСО/МЭК 2382-14, в которой внимание акцентируется на причинном аспекте, как показано на рисунке 4с), и концепцию «отказа» из МЭС 60050(191), в которой основное внимание уделено аспекту состояния, как показано на рисунке 4d). В МЭС 60050(191) состояние F называется отказом, а в МЭК 61508 и ИСО/МЭК 2382-14 оно не определено.
3. В некоторых случаях отказ или ошибка могут быть вызваны внешним событием, таким как молния или электростатические помехи, а не внутренним отказом. Более того, ошибка (в обоих словарях) может возникать без предшествующего отказа. Примером такой ошибки может быть ошибка проектирования.
Рисунок 4 - Модель отказа
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
3.21 отказ (failure): Отклонение реального функционирования от запланированного (см. рисунок 3). [МЭК 60880-2, пункт 3.8]
Примечание 1 - Отказ является результатом сбоя в аппаратуре, программном обеспечении, системе или ошибки оператора или обслуживания и отражается на прохождении сигнала.
Примечание 2 - См. также «дефект», «отказ программного обеспечения».
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
3.22 отказ (failure): Событие, заключающееся в нарушении работоспособного состояния элементов или систем платформы.
Источник: ГОСТ Р 54483-2011: Нефтяная и газовая промышленность. Платформы морские для нефтегазодобычи. Общие требования оригинал документа
3.1.7. отказ (fauit):
Состояние объекта, характеризуемое неспособностью выполнять требуемую функцию, за исключением состояний, связанных с предупредительным техническим обслуживанием или другими плановыми мероприятиями, или вследствие недостатка внешних ресурсов.
Примечание 1. - Отказ часто является результатом повреждения самого объекта, но может произойти и без предварительного повреждения объекта.
(МЭК 60204-1, п. 3.24).
Источник: ГОСТ Р МЭК 60519-1-2005: Безопасность электротермического оборудования. Часть 1. Общие требования оригинал документа
3.1.29 отказ (failure): Окончание способности изделия выполнять требуемую функцию.
Источник: ГОСТ Р 54828-2011: Комплектные распределительные устройства в металлической оболочке с элегазовой изоляцией (КРУЭ) на номинальные напряжения 110 кВ и выше. Общие технические условия оригинал документа
Русско-английский словарь нормативно-технической терминологии > отказ
-
12 устройство плавного пуска
устройство плавного пуска
-
[Интент]Устройства УБПВД-ВЦ предназначены для плавного пуска высоковольтных асинхронных и синхронных электродвигателей механизмов с "вентиляторной" (квадратично зависимой от скорости) характеристикой нагрузочного момента (центробежные компрессоры, насосы, вентиляторы, дымососы, эксгаустеры и другие аналогичные механизмы).Функции
Устройства плавного пуска УБПВД-ВЦ обеспечивают:
- проверку исправности тиристоров перед началом пуска двигателя;
- плавное нарастание тока двигателя до величины начального токоограничения, обеспечивающего трогание двигателя с места;
- формирование заданного токоограничения по времени для обеспечения разгона электродвигателя;
- фиксацию окончания разгона и выдачу сигнала на включение высоковольтного выключателя, подключающего двигатель напрямую к сети по окончании разгона;
- контроль времени разгона двигателя и выдачу сигнала на прекращение пуска при превышении заданного времени разгона.
Устройства плавного пуска УБПВД-ВЦ обеспечивает следующие виды защит:
•максимально-токовую;
•время-токовую;
•от превышения заданного времени пуска двигателя;
•от обрыва фазы главных цепей и неполнофазного пуска;
•от неисправности тиристоров;
•от неисправности устройств формирования импульсов управления тиристорами.
Основные особенности конструкции и принцип работы устройств плавного пуска
Устройства, выполненные по принципу тиристорного регулятора напряжения, обеспечивают ограничение скорости нарастания и значения пускового тока электродвигателя изменением углов отпирания тиристоров через систему импульсно-фазового управления (СИФУ). В течение заданного времени пуска электродвигателя происходит плавное нарастание напряжения на обмотках статора от нуля до номинального значения.
Пусковой ток увеличивается плавно с заданным токоограничением, не создавая ударных электромагнитных моментов, отрицательно сказывающихся на электродвигателе и механизме.
Устройства плавного пуска УБПВД-ВЦ имеют цифровую систему управления, обеспечивающую удобное программирование настройки параметров.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройств плавного пуска.
Силовая часть устройств состоит из трех тиристорных высоковольтных блоков, установленных на выкатных элементах в каждой фазе главных цепей устройства, высоковольтных разъединителей, позволяющих отключать вводы и выводы устройства, высоковольтных трансформаторов тока для обеспечения обратной связи по току и ограничителей напряжения на вводе устройства, соединенных в звезду, и вводе-выводе тиристорных высоковольтных блоков.
Каждый тиристорный высоковольтный блок содержит два силовых блока из трех (для исполнений на 6 кВ) и из пяти (для исполнений на 10 кВ) последовательно-соединенных высоковольтных тиристоров. Тиристоры выбраны с таким расчетом, что при выходе из строя одного тиристора в каждом из силовых блоков ("закоротка" во время работы). Устройство остается работоспособным, а оставшиеся в работе тиристоры в закрытом состоянии выдерживают рабочее напряжение.
Силовые блоки включены встречно-параллельно и каждый тиристор одного блока соединен с соседним другого блока, образуя реверсивные пары, состояние каждой из которых контролируются блоками контроля с высоковольтной оптронной развязкой. Информация об исправном состоянии тиристоров перед пуском разрешает начать процесс регулируемого пуска двигателя (сигнализация "Разрешение включения"). Для постоянного контроля состояния тиристоров может быть введён дополнительно блок высоковольтных резисторов, подключаемый к выводам тиристорных высоковольтных блоков.
ВТБ – высоковольтные тиристорные блоки
QSл – линейный разъединитель
QSш – шинный разъединитель
ОПН – ограничитель напряжений
ТТ – трансформатор тока
Высоковольтные R-C цепи подключаются к каждой реверсивной паре тиристоров для защиты последних от коммутационных перенапряжений.
Для выравнивания напряжений между последовательно соединенными парами тиристоров в закрытом состоянии предусмотрены делители напряжения на высоковольтных резисторах, включенных последовательно с входными цепями высоковольтных оптронных развязок, параллельно которым установлены защитные стабилитроны.
К зажимам "управляющий электрод-катод" силовых тиристоров подключены блоки ввода высоковольтных импульсных развязывающих трансформаторов, первичные обмотки которых для управления каждым силовым блоком соединены по схеме токовой петли. По этой схеме во всех блоках ввода одной токовой петли вырабатываются импульсы управления тиристорами одного силового блока для одновременного отпирания последних.
В устройствах плавного пуска УБПВД-ВЦ предусмотрены 4 регулируемые уставки начального токоограничения с равномерной шкалой от 1,0 до 4,0 Iном для обеспечения возможности запуска с помощью одного устройства нескольких двигателей разной мощности, а также регулируемые уставки времени разгона в пределах до 60 с, выбираемые дистанционно.
В устройствах плавного пуска предусмотрена связь по высокопроизводительному интерфейсу RS-485 для возможности дистанционного управления от АСУ ТП. Использование удобного пользовательского интерфейса обеспечивает максимально-улучшенные сервисно-эксплуатационные характеристики устройства.
Устройства плавного пуска УБПВД-ВЦ имеют следующие виды сигнализации:
•"Готовность" - готовность устройства к работе;
•"Окончание пуска" - завершение пуска;
•"Окончание разгона" - завершение разгона;
•"Разрешение включения" - исправность тиристоров главных цепей устройства перед пуском двигателя;
•"Отключение РВЗ разрешено" (РВЗ – разъединитель высоковольтный с заземлителем);
•"Отключение РВЗ запрещено".
Номинальное напряжение вспомогательных цепей устройства: трехфазное переменного тока (линейное) - 100 В, однофазное – 220 В.
Допустимые колебания: напряжения вспомогательных цепей от плюс 10% до минус 40% от номинального значения, частоты 2% от номинального значения.
Допустимые колебания напряжений силовых цепей 6 кВ и 10 кВ должны соответствовать ГОСТ 13109.
Электрическая прочность изоляции силовых цепей устройств плавного пуска соответствует ГОСТ 1516.1 и выдерживает испытательное напряжение переменного тока частотой 50 Гц 32 кВ (для устройств с номинальным напряжением главных цепей класса 6 кВ) и 42 кВ (для устройств с номинальным напряжением главных цепей класса 10 кВ), цепей управления, блокировки и сигнализации – 2 кВ.
[ http://www.korabel.ru/news/comments/ustroystva_plavnogo_puska_ubpvd-vts_ot_kompanii_vniir.html]Недопустимые, нерекомендуемые
Примечание(1)- По мнению автора карточкиТематики
EN
Русско-английский словарь нормативно-технической терминологии > устройство плавного пуска
-
13 сбой
сбой
Самоустраняющийся отказ или однократный отказ, устраняемый незначительным вмешательством оператора.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
сбой
Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание
МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке [ ИСО / МЭК 2382-14-01-10].
[ ГОСТ Р МЭК 61508-4-2007]Тематики
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
3.13. Сбой
Interruption
Самоустраняющийся отказ или однократный отказ, устраняемый незначительным вмешательством оператора
Источник: ГОСТ 27.002-89: Надежность в технике. Основные понятия. Термины и определения оригинал документа
3.6.1 сбой (fault): Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание - МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке 4 [ИСО/МЭК 2382-14-01-10].
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > сбой
-
14 удар
1) ( действие) blow, punch; hit, strike- трёхочковый удар
- навесной удар
- удар за пределы поля
- вонзать удар
- держать удар
- наносить больше ударов
- наносить комбинацию ударов в голову
- наносить сильный удар правой в челюсть
- наносить удар - пропускать удар
- безответный удар - боковой удар левой
- встречный удар
- запрещённый удар
- коронный удар
- короткий прямой удар
- мощный удар
- нанесённый удар
- нокаутирующий удар
- основной атакующий удар
- ответный удар
- прямой удар
- прямой боковой удар
- прямой удар левой
- резкий удар
- решающий удар
- сильный удар
- слабый удар
- удар в голову
- удар в подбородок сверху
- удар в челюсть
- удар головой
- удар, достигший цели
- удар левой
- удар открытой перчаткой
- удар ниже пояса
- удар после команды брэк
- удар снизу
- удар с поворотом
- двойной удар
- нападающий удар
- удар из трёхметровой зоны
- удар на взлёте
- удар по блоку
- удар поверх блока
- удар с первой передачи
- мастерский удар
- начальный удар
- неправильный удар
- ошибочный удар
- удар в направлении грина после начального удара
- удар паттером
- удар с ти в лунку
- удар весла
- удар ног
- удар с отскока
- диагональный удар
- кручёный удар вверх
- неотразимый удар
- обводящий удар
- плоский удар
- результативный обводящий удар
- рубящий удар
- укороченный удар
- укороченный удар с лёта
- точный удар слева
- удар навылет
- удар над головой
- удар над головой по высоко летящему мячу
- удар по мячу между ногами
- удар свечой
- удар с лёта
- удар слева
- удар слева одной рукой
- удар с обратным вращением мяча
- удар сабли
- задержанный удар
- удар в бок
- удар лезвием
- удар обухом
- удар плашмя
- удар по руке с внешней стороны
- выполнять удар
- забить ударом низом
- запаздывать с последним ударом по воротам
- повторять удар
- дальний удар
- завершающий удар
- классный удар
- короткий навесной удар
- мощнейший удар
- отбойный удар
- первый удар
- плотный удар
- плотный удар низом
- плотный удар с лёта
- прицельный удар
- пушечный удар
- разящий удар
- резаный удар
- точный удар
- угловой удар
- угловой удар с подкруткой внутрь
- угловой удар с подкруткой от ворот
- удачный удар
- удар без разбега
- удар без обработки мяча
- удар в ближний угол
- удар в перекладину
- удар в створ ворот
- удар внешней стороной подъёма
- удар внешней стороной стопы
- удар внутренней стороной подъёма
- удар внутренней стороной стопы
- удар выше ворот
- удар головой в падении
- удар головой в прыжке
- удар из-за пределов штрафной площади
- удар мимо ворот
- удар наугад
- удар низом
- удар ножницами
- удар ногой в пах
- удар от ворот
- удар по воротам - удар с близкого расстояния
- удар с левой
- удар с линии штрафной площади
- удар с места
- удар с носка
- удар с поворотом на
- удар с полулёта
- удар с разворота
- удар с угла
- удар сухой лист
- удар с ходу
- удар через себя
- удар чуть выше ворот
- обманный удар
- прямой удар слева
- удар подкидкой
- удар подсечкой
- грязный удар сзади
- удар локтём
- получить удар локтём в лицо
- удар по руке
- нанести удар по руке
- наносить комбинацию ударов по корпусу
- наносить сильный удар левой в челюсть
- хук
- боковой удар по корпусу
- свинг
- боковой удар правой
- прямой удар правой
- удар по корпусу
- удар правой
- удар мимо блока
- точный удар справа
- удар справа
- удар справа одной рукой
- удар справа двумя руками
- удар слева двумя руками
- удар по руке с внутренней стороны
- удар в дальний угол
- удар в штангу
- удар с правой
- прямой удар справа2) ( наказание) ам.ф.- штрафной удар
- семиметровый штрафной удар
- одиннадцатиметровый штрафной удар
- штрафной угловой удар
- удар с рук3) ( состояние организма) stroke- тепловой удар -
15 обратная связь
обратная связь
Зависимость текущих воздействий на объект от его состояния, обусловленного предшествующими воздействиями на этот же объект.
Примечания
1. Обратная связь может быть естественной (присущей объекту) или искусственно организуемой.
2. Различают огрицагельную обратную связь и положительную обратную связь как обратную связь, действующую в первом случае в сторону уменьшения, а во втором — в сторону увеличения отклонений текущих значений координат объекта от их предшествующих значений.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
обратная связь
Воздействие результатов процесса на его протекание.
При обратной связи сигнал на выходе системы воздействует на ее вход. В результате этого он совместно со входным сигналом определяет последующее значение выходного сигнала.
Выделяют два вида обратной связи. Если в результате рассматриваемого воздействия возрастает интенсивность процесса, то обратная связь называется положительной. Если интенсивность уменьшается, то - отрицательной. В системах управления отрицательная обратная связь обеспечивает автоматическое поддержание выбранного параметра. Например, напряжения электрического тока. Если напряжение уменьшается, то обратная связь его увеличивает. Если же оно возрастает, то - уменьшает.
[Гипертекстовый энциклопедический словарь по информатике Э. Якубайтиса]
[ http://www.morepc.ru/dict/]
обратная связь
Важнейшее понятие кибернетики, означающее обратное воздействие результатов управления системой на процесс этого управления, или, иными словами, использование в управлении информации, поступающей от объекта управления. На схеме (рис. O.1) видно, что сигнал, поступивший на вход управляемого блока, преобразуется в нем, и результат подается на выход. Через канал О.с. выход соединен с блоком сравнения, где результат оценивается. Допустим, он меньше, чем требуется, тогда блок регулирования подает сигнал, увеличивающий интенсивность процесса. Наоборот, если результат больше, чем следует, то, получив сигнал от блока регулирования (или коррекции), управляемый процесс затормозится. Это и есть действие О.с. О.с. считается положительной, когда возрастающие результаты процесса усиливают сам процесс, и отрицательной — когда они ослабляют его. Соответственно уменьшающиеся результаты процесса при положительной О.с. ослабляют его, при отрицательной — усиливают. Соединение элементов в систему с О.с. называют «антипараллельным«. Реальные экономические системы управления обычно имеют не один, как на рис. O.1, а множество последовательно и параллельно связанных между собой контуров О.с., использующих разнообразную информацию о состоянии объекта управления. Такие системы называются многоконтурными. Рис. О.1 Контур управления с обратной связью А. — управляющая подсистема, I — блок регулирования, II — блок управления, III- план или стандарт (эталон), IV — управляемая система, процесс, V — измерение на выходе, С — сигнал об отклонении.
[ http://slovar-lopatnikov.ru/]Тематики
- автоматизация, основные понятия
- экономика
EN
3.6 обратная связь (feedback): Комментарии, экспертиза и сведения о заинтересованности в продукции или процессе управления претензиями.
Источник: ГОСТ Р ИСО 10002-2007: Менеджмент организации. Удовлетворенность потребителя. Руководство по управлению претензиями в организациях оригинал документа
3.2.4 обратная связь (feedback): Информация, передаваемая пользователю и указывающая на момент активации клавиши или на активированное состояние клавиши.
Источник: ГОСТ Р ИСО 9241-4-2009: Эргономические требования к проведению офисных работ с использованием видеодисплейных терминалов (VDT). Часть 4. Требования к клавиатуре оригинал документа
Русско-английский словарь нормативно-технической терминологии > обратная связь
-
16 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
17 режим
mode, condition, regime,
function, operation, rating, setting
- (вид работы аппаратуры, системы) — mode
- (заданные условия работы двигателя при определенном положении рычага управнения двигателем) — power setting. in changing the power setting, the power-control lever must be moved in the manner prescribed.
- (мощность или тяга двигателя в сочетании с определениями как взлетный, крейсерский максимально-продолжитепьный) — power, thrust. takeoff power /thrust/. maximum continuous power /thrust/
- (номинальный, паспортный, расчетный) — rating
работа в заданном пределе рабочих характеристик в определенных условиях. — rating is а designated limit of operating characteristics based оп definite conditions.
- (номинальная мощность или тяга двигателя, приведенная к стандартным атмосферным условиям) — power rating. power ratings are based upon standard atmospheric conditions.
- (при нанесении покрытия) — condition
- (работы агрегата по производительности) — rating. pump may be operated at low or high ratings.
- (тяги двигателя при апрелеленном положении руд) — thrust. run the engine at the takeoff thrust.
- (частота действий) — rate
- автоматического захода на посадку — automatic approach (eondition)
- автоматического обмена данными с взаимодействующими системами (напр., ins, tacan) — (mode of) transmission and/or reception of specifled data between systems in installations such as dual ons, ins, tacan, etc.
- автоматического управления полетом — automatic flight condition
- автоматической выставки (инерциальной системы) — self-alignment mode
- автоматической работы двигателя. — engine governed speed condition
at any steady running condition below governed speed.
- автоматической (бортовой) системы управления (абсу, сау) — afcs (automatic flight control system) mode
- автомодуляции — self-modulation condition
-, автономный (системы) — autonomus /independent/ mode
-, автономный (системы сау) — independent control mode
- авторотации (вертолета) — autorotation, autorotative condition
заход на посадку производится с выключенным двигателем на режиме авторотации несущего винта. — the approach and landing made with power off and entered from steady autorotation.
- авторотации (воздушного винта, ротора гтд, вращающегося под воздействием набегающего воздушного потока) — windmilling. propeller ог engine rotor(s) freely rotating because of а wind or airstream passing over the blades.
-, астроинерциальный — stellar inertial mode
- астрокоррекции — stellar monitoring mode
-, бесфорсажный (без включения форсажной камеры) — cold power /thrust/, попafterburning power /thrust/
-, бесфорсажный (без впрыска воды или воднометаноловой смеси на вход двигателя) — dry power, dry thrust
- бов (блока опасной высоты) — alert altitude (select) mode
-, боевой (работы двигателя) — combat /military/ rating, combat /military/ power setting
- бокового управления (системы сту) — lateral mode. the lateral modes of fd system are: heading, vor/loc, and approach.
- большой тяги (двиг.) — high power setting
- буферного подзаряда аккумулятора — battery trickle charge (condition)
- быстрого согласования (гиpoагрегата) — fast slave mode
- ввода данных — data entry mode
- вертикальной скорости (автопилота) — vertical speed (vs) mode
-, вертикальный (системы сду или сту) — vertical mode. the basic vertical modes are mach, ias, vs. altitude, pitch
-, взлетный (двигателя) — takeoff power
-, взлетный (тяга двиг.) — takeoff thrust
-, взлетный (полета) — takeoff condition
- висения (вертолета) — hovering
- "вк" (работы базовой системы курса и вертикали (бскв) при коррекции от цвм) — cmptr mode
-, внешний (работы сау) — coupled /interface/ control mode
-, возможный в эксплуатации) — condition (reasonably) expected in operation
- вор-илс (работы директорией системы) — vor-loc mode, v/l mode
- воспроизведения (магн. записи) — playback mode
- выдерживания (высоты, скорости) — (altitude, speed) hold mode
- выдерживания заданного курса — hog hold mode
- "выставка" (инерциальной системы) — alignment /align/ mode
в режиме "выставка" система автоматически согласуется e заданными навигационными координатами и производится выставка гироскопических приборов, — in align mode system automatically aligned with reference to navigation coordinates and inertial instruments are automatically calibrated.
- выставки, автоматический (инерциальной навигационной системы) — self-alignment mode. the align status can be observed any time the system is in self-alignment mode.
- вычисления параметров ветpa — wind calculator mode. wind calculator mode is based on manually entered values of tas
- вызова (навигационных параметров на индикаторы) — call mode
- вызова на индикаторы навигационных параметров без нарушения нормального самолетовождения (сист. омега) — remote mode. position "r" enables transmission and/or reception of specified data between systems in installations such as dual ons, ins/ons, etc.
-, генераторный (стартер-генератора) — generator mode
стартер-генератор может работать в генераторном или стартерном режиме, — starter-generator can operate in generator mode or in motor mode (motorizing functi on).
-, гиперболический (работы системы омега) — hyperbolic mode. in the primary hyperbolic mode the position supplied at initialization needs only to be accurate to within 4 nm.
- гиромагнитного (индукционного) компаса (гmk) — gyro-flux gate (compass) mode
- гиромагнитной коррекции (гмк) — magnetic slaved mode (mag)
- гmк (гиромагнитного компаca) — gyro-flux gate (compass) mode
- горизонтального полета — level flight condition
- горячего резерва (рлс) — standby (stby) mode
- гпк (гирополукомпаса) — dg (directional gyro) mode, free gyro mode of operation
- "да-нет" (работы, напр., сигнальной лампы) — "yes-no" operation mode
-, дальномерный (дме) — dме mode
-, дальномерный (счисления пути) (системы омега) — dead reckoning mode, dr mode of operation, relative mode
- двигателя (no мощности или тяге) — engine power /thrust/, power /thrust/ setting
- (работы двигателя) для захода на посадку — approach power setting
-, дежурный (работы оборудования) — standby rate (stby rate)
- завышенных оборотов — overspeed condition
- заниженных оборотов — underspeed condition
- заданного курса (зк) — heading mode
режим работы пилотажного командного прибора (пкп) дпя выхода на и выдерживания зк. — in the heading mode, the command bars in the flight director indicator display bank (roll) commands to turn the aircraft to and maintain this selected heading.
- заданного путевого угла (зпу) — course mode
- захвата луча глиссадного (курсового) радиомаяка — glideslope (or localizer) cарture mode
- "земля-контур" (рлс) — contour-mapping mode
- земного малого газа — ground idle power (setting)
with engines operating at ground idle (power).
- и/или тяга, максимальный продолжительный — maximum continuous power and/or thrust
-, импульсный (сигн. ламп) — light flashing
"откл. имп. режима" (надпись) — lt flash cutout
- инерциально-доплеровский (ид) — inertial-doppler mode
-, инерциальный (работы навигационной системы) — inertial mode
-, командный (автопилота) — (autopilot) command position
both autopilots in command position.
-, компасный — compass mode
в компасном режиме магнитная коррекция курса обеспечивается датчиком ид. — when compass mode is selected, magnetic monitoring is applied from detector unit.
-, компасный (apk) (автоматического радиокомпаса) — adf compass mode. the adf function switch is set to "comp" position, (to operate in the compass mode).
- "контроль" (инерц. системы) — test mode
обеспечивает автономную проверку системы без подкпючения контр.-повер. аппаратуры. — provides the system selftesting
- (-) "контур" -(работы рлс) — contour (mode) (cntr)
- коррекции (координат места) — up-dating mode
-, крейсерский (двиг.) — cruising /cruise/ power
-, крейсерский (на з-х двигатолях) (полета) — 3-engine cruise
-, крейсерский (полета) — cruising (condition)
-, крейсерский (с поэтапным увеличением оборотов при испытании двигателя) — incremental cruise power (or thrust)
-, крейсерский, номинальный (полета) — normal cruise (nc)
-, крейсерский рекомендуемый (максимальный) — (maximum) recommended cruising power
- крейсерского полета (для скоростной или максимальной дальности) — cruise method
-, критический (работы системы, двигателя) — critical condition
- критический, по углу атаки — stalling condition
- "курсовертикаль" ("kb") — attitude (атт) mode
в данном режиме от системы не требуется получение навигационных параметров. выдаются только сигналы крена (у) и тангажа (у). — in this mode ins alignment and navigation data, except attitude, are lost.
-, курса-воздушный — air data-monitored heading hoid mode
-, курсовой (при посадке по системе сп или илс) — localizer mode
- курсозадатчика (курсовой системы гмк или гик) — flux gate slaving mode. the mode when the directional gyro is slaved to the flux gate detector.
-, курсо-доплеровский — doppler-monitored heading hold mode
- магнитной коррекции (мк) — magnetic(ally) slaved mode (mag)
- максимальной (наибольшей) дальности — long range cruise (lrc). lrc is based on a speed giving 99 % of max, range in no wind and 100 % max. range in about 100 kt headwind.
- максимальной продолжительности (полета) — high-endurance cruise
-, максимальный крейсерский (mkp) (выполняется на предельной скорости) — high speed cruise (method)
-, максимальный продолжительный (мпр) (двиг.) — maximum continuous power (мcp)
-, максимальный продолжительный (по тяге) — maximum continuous thrust (мст)
increase thrust to мст.
- малого газа — idling power (setting)
попеременная работа двигателя на номинальной мощности и режиме малого газа или тяги, — one hour of alternate fiveminute periods at rated takeoff power and thrust аnd at idling power and thrust.
- малого газа на земле — ground idling power /conditions/
- малого газа при заходе на посадку — approach idling power /conditions/
- малой тяги (двиг.) — low power setting
- (-) "метео" (работы рлс) — weather (mode)
- "метео-контур" (рлс) режим — contour-weather mode
- (5-ти) минутной мощности (двиг.) — (five-) minute power
- "мк" (магнитной коррекции) — mag
- мощности, максимальный продолжительный (двиг.) — maximum continuous power
- мощности, чрезвычайный — emergency power
- набора высоты — climb condition
- "навигация" (инерциальной системы) — navigation (nav) mode
при заданном режиме система обеспечивает вычисление навигационных и директорных параметров и выдает информацию на пилотажные приборы и сау. — in this mode system computes navigation and steering data. provides attitude information to flight instruments and fcs.
- наибольшей (макеимальной) дальности — long range cruise (lrc)
горизонтальный полет на скорости наибольшей дальности, на которой километровый расход топлива при полете на заданной высоте наименьший. — а level flight at а given altitude and best range cruise speed giving the minimum kilometric fuel consumption.
- наибольшей продолжительности (полета) — high-endurance cruise
горизонтальный полет на скорости наибольшей продолжнтельности, на которой часовой расход топлива при полете на заданной высоте наименьший. — а level flight at а given altitude and high-endurance cruise speed giving the minimum fuel flow rate (in kg/h or liter/h)
- начала автоматической работы (нар режим начала автоматического регулирования работы гтд) — engine governed run/operation/ onset mode
- нвк (начальной выставки — initial heading alignment
-, непрерывной (обработки данных) — burst mods (data processing)
-, нерасчетный — off-design rating
-, неуетановившийся — unsteady condition
- (0.65) номинала, на бедной смеси — (65%) power, lean mixture setting
-, номинальный (двиг.) — (power) rating, rated power
-, номинальный (mпp) — maximum continuous power
- нормального обогрева (эп.) — normal-power heat (condition)
-, нормальный (работы агрегата) — normal rating
-, номинальный крейсерский (полета) — normal cruise (nc). used on regular legs and based on m = 0.85.
- обзора земной поверхности (рлс) — ground-mapping (map) mode
- обнаружения грозовых образеваний — thunderstorm detection mode (wx)
- "обогрев" (инерц. системы) — standby mode
режим предназначен для создания необходимых температурных условий работы элементов инерциальной системы (гироскопов, блоков автоматики и электроники). — the standby mode is а heating mode during which fast warm-up power is applied to the navigation unit until it reaches operating temperature.
- обогрева — heating mode
- обогрева лобовых стекол "слабо", "сильно" — windshield "warm up", "full power" heating rating
-, одночасовой максимальный (двиг.) — maximum one-hour power
- ожидания ввода координат исходного места самолета — initial position entry hold mode
- ожидания посадки — holding
-, оптимальный экономический (двиг.) — best economy cruising power
- освещения меньше-больше (яркость) — dim-brt light modes check lights in dim and brt modes.
-, основной навигационный (сист. "омега") — primary navigation mode
- отключенного шага (программы) — step off mode
- отсутствия сигналов ивс (системы омега) — no tas mode
- оценки дрейфа гироскопа — gyro drift evaluation mode
- перемотки (маги, ленты) — (tape) (re)wind mode
- пересиливания автопилота — autopilot overpower operation /mode/
-, переходный — transient condition
- планирования — gliding condition
- повышенных оборотов — overspeed condition
- полета — flight condition /regime/
состояние движения ла, при котором параметры, характеризующие это движение (например, скорость, высота) остаются неизменными в течение определенного времени. — it must be possible to make а smooth transition from one flight condition to any other without exceptional piloting skill, alertness, or strength.
- полета, критический — critical flight (operating) condition
- полета на курсовой маяк (при посадке) — localizer (loc) mode. flying in loc (or vor) mode.
- полета на станцию вор — vor mode
- полета, неустановившийся — unsteady flight condition
- полета по маяку вор — vor mode
- полета по системе илс — ils mode
- полета по условным меридианам — grid mode
данный режим применяется в районах, не обеспечивающих надежность компасной информации. — the grid mode can be used in areas where compass information is unreliable.
- полета, установившийся — steady flight condition
- полетного малого газа — flight idle (power)
-, полетный (двиг.) — flight power
-, пониженный (ниже номинала) (двиг.) — derating
- пониженных оборотов — underspeed condition
при возникновении режима пониженных оборотов рогулятор оборотов вызывает дополнительное открытие дроссельного крана. — for underspeed condition, the governor will cause the larger throttle opening.
-, поперечный (системы сду или сту) — lateral mode. the basic lateral modes are heading, vor/loc and approach.
-, посадочный (полета) — landing condition
- правой (левой) коррекции (оборотов двигателя вертолета) — engine operation with throttle control twist grip turned clockwise (counterclockwise)
-, практически различаемый — practically separable operating condition
к практически различаемым режимам полета относятся: взлетный, крейсерский (mapшрутный) и посадочный, — practically separable operating condition, such as takeoff, en route operation and landing.
- (работы двигателя), приведенный к стандартной атмосфере — power rating based upon standard atmospheric conditions
- приведения к горизонту — levelling
- продления глиссады — glideslope extension mode
the annunciator indicates when glideslope extension (ext) mode provides command signals to the steering computer.
- продольного управления (системы сту) — vertical mode. the vertical modes of fd system are: mach, ias, vs. altitude, pitch.
- просмотра воздушного пространства (переднего) — airspace observation mode (ahead of aircraft)
- просмотра воздушного пространства на метеообстановку (рлс) — radar weather observation mode
- просмотра земной поверхности (рлс) — ground mapping operation. the antenna is tilted downward to receive ground return signals.
- прямолинейного горизонтального полета — straight and level flight condition
- (частота) пусков ракет — (rocket firing) rate
- "работа" (положение рычага останова двигателя) — run
- "работа" (инерциальной навигационной системы) — navigate mode, nav mode. system automatically changes from alignment to navigate mode.
- работы — condition of operation
test unit in particular condition of operation.
- работы (агрегата, напр., наcoca) — rating
- работы (агрегата по продолжительности) — duty (cycle)
режим работы может быть продопжитепьным или повторно-кратковременным. — the duty cycle may be continuous or intermittent.
- работы (инерциальной системы) — mode of operation, operation mode
- работы, автоматический (двиг.) — governed speed /power/ setting
- работы автоматической системы управления (абсу, сау) — autoflight control system (afcs) mode
- работы автопилота — autopilot mode
- работы автопилота в условиях турбулентности — autopilot turbulence (turb) mode
при работе в условиях турбулентности включается демпфер рыскания для обеспечения надежной управляемости и снижения нагрузок на конструкцию ла. — use of the yaw damper with the autopilot "turb" mode will aid in maintaining stable control and in reducing structural loads.
- работы автопилота при входе в турбулентные слои атмосферы — autopilot turbulence penetration mode
данный режим применяется при полете в условиях сильной турбулентности воздуха, — use of the autopilot turbulence penetration mode is recommended for autopilot operation in severe turbulence.
- работы автопилота с директорной системой, совмещенный — ap/fd coupled mode
- работы двигателя (по мощности) — engine power (setting)
- работы двигателя (по тяге) — engine thrust (setting)
- работы двигателя (по положению руд) — engine power setting
- работы двигателя в особых условиях, (повышенный) — emergency (condition) power
- работы двигателя на земле — engine ground operation
- работы двигателя на малых оборотах — engine low speed operation
- работы двигателя, номинальный — engine rating. ths jt9d-з-за engines operate at jt9d-3 engine ratings.
- работы (двигателя), приведенный к стандартной атмосфере — power rating /setting/ based upon standard atmospheric conditions
- работы источника света, установившийся — light source operation at steady value
- работы, кратковременный — momentary operating condition
- работы no времени (агрегата) — time rating
- работы, повторно-кратковременный (агрегата) — intermittent duty
пусковая катушка работает в повторно-кратковременном режиме. — booster coil duty is intermittent.
- работы (системы), полетный — (system) flight operation
при выпуске передней опоры шасси система переключается на полетный режим, — when the nose lg is eхtended, the function of the system is transferred to flight operation.
- работы no сигналам станции омега — omega mode operation
- работы, продолжительный (агрегата) — continuous duty
генератор двигателя работает в продолжительном режиме, — the engine-driven generator duty is continuous.
- работы противообледенительной системы, нормальный — normal anti-icing
- работы противообледенительной системы, форсированный — high anti-icing
- работы самолетного ответчика (а - на внутренних линиях, в - на международных) — transponder mode (а - domestic, в - international)
- работы системы траекторного управления (сту), боковой — lateral mode
- работы сту, продольный — vertical mode
- рабочий (работы автопилота) — (autopilot) active position both autopilots in command positions, one active and one standby.
- рабочий (работы оборудования) — normal rate (norm rate)
- равновесной частоты (вращения) (двиг.) — on-speed condition
- равновесных оборотов — оп-speed condition
работа регулятора оборотов в режиме равновесных оборотов. — the constant speed governor operation under on-speed condition.
-, радиотелеграфный, тлг (автоматич. радиокомпаса) — c-w operation
-, радиотелеграфный (связи) — c-w communication, radio telegraphic communication
-, радиотелефонный, тлф (apk) — rt (radio telephone), voice operation (v), voice
-, радиотелефонный (связи) — voice communication, radio telephone communication
переключить передатчик на радиотелефонную связь, — set the transmitter for voice communication.
-, рамочный (арк) — loop mode
- распознавания светила — star identification mode
-, располагаемый максимальный продолжительный (двиг.) — available maximum continuous power
-, расчетный — rating
-, расчетный (условия работы) — design condition
- регулирования избыточного давления (системы скв) — differential pressure control (mode)
-, резервный (аварийный) (дв.) — emergency power rating
работа двигателя при гидромеханическом управлении оборотами и температурой при отказе электронной системы управления.
-, резервный (работы автопилота) — (autopilot) standby position
- самовращения (несущего винта) — autorotation, autorotative condition
- самоориентирования (переднего колеса шасси) — castoring
- скоростной дальности — high-speed cruise method
- "слабо", "сильно" (обогрева лобовых стекол) — (windshield heat) warm up, full power
- слабого обогрева (эл.) — warm-up heat (condition)
-, следящий (закрылков) — (flap) follow-up operation (mode)
when the flaps are raised, the flap follow-up system operates the slat control valve.
-, смешанный (работы спойлеров) — drag/aileron mode. а drag/aileron mode is used during descent both for retardation and lateral control.
- снижения — descent condition
-, совмещенного управления — override control mode
оперативное вмешательство в работу включенной системы.
-, совмещенный (при работе с др. системой) — coupled mode
-, совмещенной (работы автопилота) — autopilot override operation /mode/
в этом режиме отключаются рм и корректор высоты и летчик оперативно вмешивается в управление ла посредством штурвала и педалей. — то manually or otherwise deliberately overrule autopilot system and thereby render it ineffective.
-, совмещенный — both mode
(работы рлс в режимах обзора метеообразований и земной поверхности и индицирования маяков) — for operation in rad and bcn modes.
- согласования (автопилота) — synchronization mode
- согласования (работы следящей системы) — slave /synchronization/ mode
- стабилизации (крена, тайгажа, направления, автопилота) — roll (pitch, yaw) stabilization mode
- стабилизации (работы сту) — hold mode
the vertical and lateral modes are hold modes.
- стабилизации крена (в сту) — roll /bank/ (attitude) hold mode
- стабилизации курса (aп) — heading hold mode
- стабилизации тангажа (в сту) — pitch (attitude) hold mode
-, стартерный (всу) — engine start mode
apu may run in the engine start mode or as apu.
-, стартерный (стартер-гоноратора) — motor(izing) mode, (with) starter-generator operating as starter
- стопорения (работы следящей системы) — lock-out mode
- "сход(на) нзад" — return-to-selected altitude (mode)
- счисления пути (или дальномерный) (системы омега) — dead reckoning mode, dr mode of operation, relative mode
-, температурный — temperature condition
- тлг (работы арк) — c-w operation
- тлф (арк) — rt (radio telephone), voice
-, тормозной (работы спойле — drag /retardation/ mode
- управления — control mode
- управления в вертикальной плоскости (ап) — vertical mode
- управления в горизонтальной плоскости (инерциальной системы) — lateral control mode
управление по курсу, на маяки вор и крм. — the basic lateral modes are heading, vor/loc and approach.
- управления, позиционный (no командно-пилотажному прибору) — flight director control mode
- управления по крену (aп) — roll (control) mode
- управления, поперечный (автопилота) — lateral mode
- управления по тангажу (ап) — pitch (control) mode
- управления, продольный (автопилота) — vertical mode. vertical command control provides either vertical speed or pitch command.
- управления, штурвальный — manual (flight) control
-, усиленный (дополнительный, форсированный) (двиг.) — augmented power (rating)
при данном режиме увеличиваются температура газов на входе в турбину, обороты ротора или мощность на валу. — engine augmented takeoff power rating involves increase in turbine inlet temperature, rotor speed, or shaft power.
-, установленный (для данных условий испытаний двигателя) — rated power. а 30-hour run consisting of alternate periods of 5 minutes at rated takeoff power.
-, форсажный (с включенной форсажной камерой) — reheat /afterburning/ power /thrust/
-, форсажный (по тяге двиг.) — reheat thrust
-, форсажный (с впрыском воды или водометаноловой смеси на вход двигателя) — wet power, wet thrust
-, форсажный, полный (двиг.) — full reheat power /thrust/
- форсированного обогрева — full-power heat (conditions)
-, форсированный (работы агрегата) — high rating
-, форсированный (усиленный) (двиг.) — augmented power /thrust/
-, форсированный взлетный — augmented takeoff power
- холостого хода (двигателя вертолета с отключенной трансмиссией) — idle run power (with rotor drive system declutched)
- холостого хода (генератора, всу, электродвигателя) — по-load operation
-, чрезвычайный (работы двигателя в особых условиях) — emergency (condition) power
-, чрезвычайный (по тяге двигателя) — emergency thrust
-, чрезвычайный, боевой (двиг.) — combat /war/ emergency power
-, штурвальный (управления ла) — manual control mode
-, экономичный крейсерский — (best) economy cruising power
-, эксплуатационный (работы, агрегата, двигателя, самолета) — operational /operating/ condition
-, эксплуатационный (двиг.) — operational power rating
эксплуатационные режимы включают: взлетный, максимальный продолжительный (крейсерский), — operational power ratings cover takeoff, maximum continuous (and cruising) power ratings.
-, эксплуатационный полетный (двиг.) — flight power (rating)
двигатель должен нормально работать на всех эксплуатационных (полетных) режимах, — the engine must be capable of operation throughout the flight power range.
-, электромоторный (стартер генератора) — motor(izing) mode
-, элеронный (работы спойлеров) — aileron mode, lateral control augmentation mode
в p. (работы оборудования) — in mode
presently flying in heading (h) mode on a 030° heading.
в p. самоориентирования (о переднем колесе шасси) — in castor, when castoring
в пределах эксплуатационных р. — within (approved) operating limitations
выход на р. малого газа (двиг.) — engine (power) setting at idle, engine idle power setting
изменение p. работы двигатепя — change in engine power (or thrust)
метод установки (получения) (заданного p. работы двигателя) — methods for setting (engine) thrust /power/
на (взлетном) р. (двиг.) — at (takeoff) power
with the engine operating at takeoff power.
на (взлетном) р. (полета) — under (takeoff) condition
на максимальном продолжительном p. — at maximum continuous power
обороты (двигателя) на взлетном р. — takeoff (rotational) speed engine run at takeoff power with takeoff speed.
обороты (двигателя) на максимальном продолжительном p. — maximum continuous speed engine run at rated maximum continuous power with maximum continuous speed.
переключение p. (работы оборудования) — mode selection
переход (вертолета) от нормального р. к р. висения — reconversion
полет на крейсерском р. — cruise flight
полет на р. висения — hovering flight
при работе двигателя на взлетном р. — with engine at takeoff power, with takeoff power on (each) engine
при работе каждого двигателя на р., не превышающем взлетный — with not more than takeoff power on each engine
при установившемся р. работы с полной нагрузкой — at steady full-load condition
(75)% максимального продолжительного (или номинального) р. — (75) percent maximum continuous power (thrust)
работа на (взлетном) р. (двиг.) — (takeoff) power operation, operation at takeoff power
установка p. работы (двиг.) — power setting
этап p. (при испытаниях двигателя) — period. during the third and sixth takeoff power periods.
включать р. (работы аппаратуры системы) — select mode
включать р. продольного (поперечного) управления (aп, сду) — select vertical (lateral) mode
включить систему в режим (напр., "выставка") — switch the system to (align mode, switch the system to operate in (align mode)
выдерживать (взлетный) р. (двиг.) — maintain (takeoff) power
выходить на (взлетный) р. (двиг.) — come to /attain, gain/ (takeoff) power /thrust/, set engine at takeoff power /thrust/, throttle to takeoff power /thrust/
выходить на р. прямолинейного горизонтального полета гонять двигатель на (взлетном) р. — recover to straight and level flight run the engine at (takeoff) power
изменять р. работы двигателя — change engine power
изменять установленный р. (двиг.) — change power setting
лететь в автоматическом р. управления — fly automatically
лететь в курсовом р. — fly heading (н) mode
лететь в штурвальном р. — fly manually
передавать в телеграфном р. — transmit on c-w /rt/
передавать в радиотелефонном р. — transmit on voice
переключать р. — select mode
переключаться на р. — switch to mode the computer automatically switches to course mode.
переходить (автоматически) в режим (напр., курсовертикаль) — system automatically changes to атт mode
переходить с р. (малого газа) на (взлетный) р. (двиг.) — come from (idle) power to (takeoff) power
проводить р. (30 часовых) испытаний последовательно чередующимися периодами по... часов — conduct а (30-hour) run consisting of alternate periods of... hours
работать в р. — operate on /in/ mode
работать в режиме гпк — operate in dg mode, be servoed to directional gyro
работать в индикаторном р. (о сельсине) — operate as synchro indicator
работать в трансформаторном р. (о сельсине) — operate as synchro transformer
работать на (взлетном) р. (двиг.) — operate at (takeoff) power /thrust/
работать на р. малого газа — idle, operate at idle (power)
увеличивать р. работы (двиг.) (до крейсерского) — add power (to cruising), throttle (to cruising power)
уменьшать p. двигателя (до крейсерского) — reduce power to cruising
устанавливать взлетный р. (двиг.) — set takeoff power /thrust/, set engine at takeoff power
устанавливать компасный р. работы (apk) — select compass mode
устанавливать p. набора высоты — establish climb
устанавливать р. полета — establish flight condition
устанавливать рамочный р. работы (арк) — select loop mode
устанавливать (взлетный) р. работы двигателя — set (taksoff) power /thrust/, set the engine at takeoff power /thrust/
устанавливать p. снижения — establish descentРусско-английский сборник авиационно-технических терминов > режим
18 часть
part
(деталь или неразъемный узел)
один, две или несколько элементов, соединенных вместе, и обычно не подлежащие разборке, которая может привести к нарушению функционального назначения части. — one piece, or two or more pieces joined together which are not normally subject to disassembly without destruction of designed use.
- (составляющая доля) — part
смесь состоит из одной части воды и одной части бензола. — mixture contains one part of water and one part of benzol.
- (зона, участок конструкции или детали) — portion
данная часть крыла заключена между фюзеляжем и внутренним двигателем. — this portion of the wing is between the fuselage and the inboard engine.
- (узел крыла или фюзеляжа, представляющий собой единую конструктивно-технологическую единицу) — section
- агрегата (блока, сборки) — sub-assembly
- аэродинамической трубы, рабочая — wind-tunnel test section
-, весовая (вес. ч.) — part by weight
-, горячая (двиг.) — "hotп", portion, "hot end" overheating of the "hot end" of the engine.
- двигателя, входная (передняя) входная часть двигателя состоит из входного воздухозаборного контура и наружного корпуса. — engine nose section the engine nose section consists of an inner duct (engine air inlet) and outer cowl surrounding the duct.
- двигателя, нижняя датчик тахометра смонтирован в нижней части двигателя. — engine bottom the tachometer generator is mounted on/at/the bottom of the engine.
- двигателя, проточная (газовоздушный тракт) — engine gas flow duct
-, забустерная (системы управления) — actuating /actuator/ portion of system)
-, запасная — spare part
-, измерительная (напр., расходомера, топливомера) — metering portion
- компрессора, проточная — compressor airflow duct
- конструкции, несиловая — secondary structural member
- конструкции, силовая — primary structural member
- контакта (шр), срезанная (для подпайки провода) (рис. 74) — bevelled end (of connector terminal)
- коридора, головная (для посадки /высадки пассажиров в аэропорту) — passenger boarding bridge head
-, корневая (крыла) — root portion
- крыла, кессоная — wind torsion box
- крыла, консольная (кчк, при наличии очк) — inner wing
- крыла, неподвижная (нчк, у крыла изменяемой геометрии) — fixed wing (section)
- крыла, носовая (носок крыла) (рис.1) — wing leading edge section
- крыла, отъемная (очк) (рис. 1, 8) — outer wing (panel)
- крыла, поворотная (пчк) — pivoting wing (section)
- крыла, подвижная (поворотная) — movable /moving, pivoting/ wing
- крыла, подвижная (предкрылок, закрылок, спойлер) — wing extendable device
- крыла, средняя (счк) (рис. 8) — inner wing
- крыла, центральная (цчк) — wing center section
- кулачка, цилиндрическая (не воздействующая на сопряженную деталь) — cam dwell
- купола парашюта, верхняя — parachute canopy crown
the upper portion of canopy.
- купола парашюта, нижняя (юбка) — parachute саперу skirt the lower portion of the canopy.
- лопасти, комлевая (возд. винта) (рис. 58) — blade shank
- лопатки, замковая (ротора) — blade root
- лопатки (ротора), замковая "елочного" типа — balde fir-tree root
- лопатки (ротора), замковая типа "ласточкин хвост" — blade dovetail root
- лопатки (ротора), замковая, фиксируемая пальцем и кольцом — blade solid root (with retaining pin and locking ring)
- лопатки, корневая (замковая) — blade root
- материальная часть (матчасть) — hardware
влияние климатических условий на матчасть и техсостав. — effect of climatic conditions on hardware and working personnel.
- нервюры, средняя — intermediate rib
межлонжеронная часть нервюры (рис. 10). — intermediate rib is the interspar portion of the rib.
- опоры, подвижная (поворотный хомут передней опоры шасси) — (lower) steering collar /sleeve/
-, ответная (шр) — mating half of connector
-, открытая (штока амортизатора, гидроцилиндра) — exposed portion (of shock strut piston or actuator operating rod)
-, переходная (конструкции) — transition section
напр., часть, соединяющая двигатель с удлинительной трубой или трубу с соплом.
-, поворотная (передн. стойки шасси) — (nose landing gear) steering sleeve
-, подвижная — moving /movable/ part
- полета, оставшаяся (до конечного пункта маршрута) — remainder of flight generator is inoperative for remainder of flight.
-, проточная (воздуха, газа) — (air, gas) flow section
-, профильная (лопасти, лопатки) — (blade) airfoil portion
-, рабочая (лопасти) — pressure side
-, рабочая (прибора, устройства) — working part
проверять состояние всех подвижных или рабочих частей компаса. — аll movable or working parts of the compass must be inspected for condition.
- разъема, наземная (наземного оборудования) — connector /coupling/ ground part
- разъема, самолетная — connector /coupling/ aircraft part
- самолета, подвижная — aircraft (movable) part
к подвижным частям самолета относятся: закрылки, возд. тормоза, снайперы и т.д. — flaps, air brakes, spellers, etc. are movable parts of the aircraft structure.
-, силовая (бустерной системы) — power portion
силовая часть включает источник питания (напр., гидронасос), краны, трубопроводы и исполнительные механизмы. — the power portion includes power source, such as hydraulic pumps, and such items as valves, lines and actuators.
- системы — portion of system
- системы, исполнительная — actuating /actuator/ portion of system
- снаряжения (неполный состав) — incomplete operational items
-, составная (агрегата, системы) — component part each component part acts and interacts in accordance with overall design of an arrangement (system).
деталь, подузел, узел и/или изделие. — either а part, sub-assembly, assembly, assembly and/or unit.
- управление, забустерная — power-operated output (control) linkage
- уравнения (правая, левая) — equation (right-hand, lefthand) side
- фонаря, неподвижная — fixed portion of canopy
- фонаря, откидная — hinged portion of canopy
- фонаря, сдвижная — sliding portion of canopy
- фюзеляжа (рис. 6) — fuselage section
- фюзеляжа, герметичная — fuselage area within pressure seals, pressurized area of fuselage
- фюзеляжа, задняя, правая (левая) — aft right (left) fuselage
- фюзеляжа, негерметичная — unpressurized area of fuselage
- фюзеляжа, нижняя — fuselage underside /bottom/
- фюзеляжа, носовая — fuselage nose section
- фюзеляжа, отклоняемая носовая — fuselage droop nose
- фюзеляжа, передняя — fuselage nose section
- фюзеляжа, передняя правая (левая) — right (left) forward fuselage
- фюзеляжа, средняя — fuselage center section
- фюзеляжа, хвостовая — fuselage tail section
- хвостовой балки, переходная (между фюзеляжем и балкой) — tail bottom transition section
- центрального пульта, задняя (передняя) — aft (forward) center pedestal
- элемента конструкции — portion of structural element or component)
- элерона, концевая — outboard portion of aileron
- элерона, корневая — inboard portion of aileron
- элерона, носовая — nose /le/ portion of aileron, aileron le section
в левой (правой, центральной) ч. приборной доски — at left (right, central) portion of instrument panel
пилотажные приборы командира корабля находятся в левой части приборной доски, второго пилота - в правой, а приборы силовой установки в центральной. — pilot's flight instruments are at the left of the instrument panel, copilot's instruments are at the right, power plant instruments are at the (lower) center.
в передней (задней) ч. кабины — at fore (rear) end of cabinРусско-английский сборник авиационно-технических терминов > часть
19 аварийный сигнал (в автоматизированных системах)
аварийный сигнал
аварийная сигнализация
Оповещение оператора о наступлении определенного события, связанного с нарушением или угрозой нарушения регламентного течения технологического процесса.
[ http://kazanets.narod.ru/AlarmsArchive.htm]Аварийные сигналы настраиваются путем задания предельных значений (границ, thresholds) индивидуально для каждой процессной переменной. Система автоматически отслеживает изменение процессной переменной и сопоставляет ее значение с заранее настроенными границами. В случае выхода переменной за нормальные границы система генерирует оповещение и фиксирует его в журнале аварийных сигналов. Рассмотрим наиболее часто используемые аварийные сигналы для аналоговых величин:
Lo – нижняя предупредительная граница. В случае если процессная переменная становится меньше Lo, генерируется предупредительное оповещение.
LoLo – нижняя аварийная граница. В случае если процессная переменная становится меньше LoLo, генерируется аварийный сигнал.
Hi - верхняя предупредительная граница. В случае если процессная переменная становится больше Hi, генерируется предупредительное оповещение.
HiHi – верхняя аварийная граница. В случае если процессная переменная становится больше HiHi, генерируется аварийный сигнал.
DEV_HI (DEVIATION_HI) – верхняя граница отклонения (рассогласования). Если разность (абсолютное значение) между двумя переменными становится больше DEV_HI, то генерируется аварийный сигнал. Например, такой сигнал можно настроить у блока PID; в этом случае система будет сигнализировать об отклонении регулируемой величины от уставки, превышающей границу DEV_HI. По аналогии можно настроить сигнал DEV_LO.
ROC_HI (RATE_OF_CHANGE_HI) – верхняя граница скорости изменения. Система отслеживает скорость изменения процессной переменной (первую производную). Если скорость возрастания переменной выше границы ROC_HI, то генерируется аварийный сигнал.
Для дискретных переменных сигналов гораздо меньше. По сути их всего две – аварийное состояние, соответствующее значению 1, или авария в случае значения 0.
На рис. 4 показана схема появления аварийных сигналов на примере быстро изменяющейся процессной переменной. Стоит отменить, что на рисунке изображены отнюдь не все генерируемые оповещения. Например, при возврате переменной обратно в нормальный диапазон значений, кроме изображенных на рисунке, генерируется оповещение RETURN_TO_NORMAL
Рис. 4. Пример генерации аварийных сигналов и оповещений.Важность (или критичность) аварийного сигнала определяется приоритетом (целое число). Как правило, чем выше приоритет у аварийного сигнала, тем критичнее она для производства, и тем быстрее на нее надо обратить внимание.
При появлении аварийного сигнала у оператора есть два варианта действий:
1. Игнорировать его. Не всегда хорошее решение, мягко говоря. При этом если процессная переменная вернется обратно в нормальные границы, то появиться новое оповещение UNACK_RETURN_TO_NORMAL, говорящее о том, что оператор проспал аварийное событие, но, к счастью, все нормализовалось.
2. Подтвердить, что сигнал замечен оператором ( acknowledge). Дело в том, что сразу после появления аварийного сигнала ему автоматически присваивается статус UNACK (не подтвержден). Как только сигнал подтверждают (иногда говорят “квитируют”), его статус становится ACK (подтвержден). В этом случае возврат переменной в нормальные границы ведет к появлению оповещения ACK_RETURN_TO_NORMAL, свидетельствующее о том, что оператор “держит ухо востро”.
Аварийные сигналы можно произвольно группировать. На практике группировка проводится путем распределения процессных переменных, а следовательно, и соответствующих им аварийных сигналов по различным технологическим участкам ( plant areas) и установкам ( plant units).
[ http://kazanets.narod.ru/AlarmsArchive.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > аварийный сигнал (в автоматизированных системах)
20 датчик
датчик
Средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем (по РМГ 29).
[ ГОСТ Р 51086-97]
датчик
Конструктивно обособленный первичный преобразователь, от которого поступают измерительные сигналы (он «дает» информацию).
Примечания
1. Датчик может быть вынесен на значительное расстояние от средства измерений, принимающего его сигналы.
2. В области измерений ионизирующих излучений применяют термин детектор.
Пример. Датчики запущенного метеорологического радиозонда передают измерительную информацию о температуре, давлении, влажности и других параметрах атмосферы.
[РМГ 29-99]
датчик
Конструктивно обособленный первичный преобразователь, от которого поступают измерительные сигналы.
[РД 01.120.00-КТН-228-06]
датчик
Первичный преобразователь, в котором изменения значений выходного воздействия или сигнала с заданной точностью соответствуют изменениям значений входного воздействия или сигнала.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
КЛАССИФИКАЦИЯ
Классификация по виду выходных величин
Классификация по измеряемому параметру
- Датчики давления
- Датчики расхода
- Уровня
- Температуры
- Датчик концентрации
- Радиоактивности (также именуются детекторами радиоактивности или излучений)
- Перемещения
- Положения
- Фотодатчики
- Датчик углового положения
- Датчик вибрации
- Датчик механических величин
- Датчик дуговой защиты
Классификация по принципу действия
- Оптические датчики (фотодатчики)
- Магнитоэлектрический датчик (На основе эффекта Холла)
- Пьезоэлектрический датчик
- Тензо преобразователь
- Ёмкостной датчик
- Потенциометрический датчик
- Индуктивный датчик
Классификация по характеру выходного сигнала
Классификация по среде передачи сигналов
Классификация по количеству входных величин
Классификация по технологии изготовления
[ http://omop.su/article/49/74929.html]
Тематики
- автоматизация, основные понятия
- датчики и преобразователи физических величин
- метрология, основные понятия
- средства автоматизации прочие
Обобщающие термины
EN
3.3.2 датчик (sensor): Функциональный блок газоанализатора, в котором расположен первичный преобразователь.
Источник: ГОСТ Р 52350.29.1-2010: Взрывоопасные среды. Часть 29-1. Газоанализаторы. Общие технические требования и методы испытаний газоанализаторов горючих газов оригинал документа
3.5 датчик (sensor): Устройство, изготовленное из непроводящего жаростойкого материала, в которое вмонтирован калориметр.
Источник: ГОСТ Р 12.4.234-2007: Система стандартов безопасности труда. Одежда специальная для защиты от термических рисков электрической дуги. Общие технические требования и методы испытаний оригинал документа
3.46 датчик (sensor): Сборочная единица, в которой расположен чувствительный элемент, которая также может содержать элементы электрической схемы.
Источник: ГОСТ Р 52350.29.2-2010: Взрывоопасные среды. Часть 29-2. Газоанализаторы. Требования к выбору, монтажу, применению и техническому обслуживанию газоанализаторов горючих газов и кислорода оригинал документа
5.1.14. ДАТЧИК
Устройство, состоящее из воспринимающего элемента и преобразователей
PC 1376
Источник: РМ 4-239-91: Системы автоматизации. Словарь-справочник по терминам. Пособие к СНиП 3.05.07-85
3.3. датчик (sensor): Элемент конструкции коврика или пола, реагирующего на давление, содержащий эффективную чувствительную область; воздействие силы на эту область заставляет изменять состояние сигнала от датчика до блока управления.
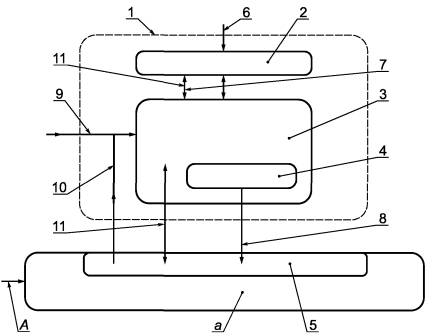
1 - обработка выходного сигнала коврика или пола, реагирующего на давление; 6 - воздействующая сила; 7 - выход датчика;
Рисунок 1 - Схема конструкции коврика или пола, реагирующего на давление, для работы с машиной
Русско-английский словарь нормативно-технической терминологии > датчик
Страницы- 1
- 2
См. также в других словарях:
Конечное состояние блока АС после вывода из эксплуатации — заданное программой вывода из эксплуатации блока АС состояние блока АС после завершения всех работ по выводу из эксплуатации. Источник: НП 012 99: Правила обеспечения безопасности при выводе из эксплуатации блока атомной станции … Словарь-справочник терминов нормативно-технической документации
Блока́да се́рдца — замедление или полное прекращение прохождения импульсов возбуждения по проводящей системе сердца. Замедление проведения импульса называют неполной Б. с., а прекращение его проведения полной. Причинами Б. с. могут быть дистрофия (в т.ч. вследствие … Медицинская энциклопедия
Блока́торы гистами́новых реце́пторов — (синонимы: антагонисты гистамина, гистаминоблокаторы) лекарственные средства, устраняющие физиологические эффекты гистамина, блокируя рецепторы чувствительных к нему клеток. В клинической практике используются блокаторы для двух из трех известных … Медицинская энциклопедия
КОНЕЧНОЕ СОСТОЯНИЕ — 23. КОНЕЧНОЕ СОСТОЯНИЕ установившееся контролируемое состояние систем и элементов АС после аварии. Источник: ПНАЭ Г 01 011 97: Общие положения обеспечения безопасности атомных станций Конечное состояние установившееся в результате развития аварии … Словарь-справочник терминов нормативно-технической документации
НП 012-99: Правила обеспечения безопасности при выводе из эксплуатации блока атомной станции — Терминология НП 012 99: Правила обеспечения безопасности при выводе из эксплуатации блока атомной станции: База данных по выводу из эксплуатации блока АС совокупность документально подтвержденных и упорядоченных сведений об эксплуатации блока АС … Словарь-справочник терминов нормативно-технической документации
РБ 029-04: Состав и содержание материалов по обоснованию остаточного ресурса элементов блока атомной станции для продления срока его эксплуатации — Терминология РБ 029 04: Состав и содержание материалов по обоснованию остаточного ресурса элементов блока атомной станции для продления срока его эксплуатации: 1 . Дополнительный срок эксплуатации календарная продолжительность (период)… … Словарь-справочник терминов нормативно-технической документации
техническое состояние — 3.5 техническое состояние: Состояние, которое характеризуется в определенный момент времени, при определенных условиях внешней среды значениями параметров, установленных технической документацией на объект. Источник: ГОСТ Р 52727 2007:… … Словарь-справочник терминов нормативно-технической документации
отказ (функционального блока) — отказ Прекращение способности функционального блока выполнять необходимую функцию. Примечания 1. Определение в МЭС 191 04 01 является идентичным, с дополнительными комментариями [ИСО/МЭК 2382 14 01 11]. 2. Соотношение между сбоями и отказами в… … Справочник технического переводчика
РБ 027-04: Состав и содержание отчета по результатам комплексного обследования блока атомной станции для продления срока его эксплуатации — Терминология РБ 027 04: Состав и содержание отчета по результатам комплексного обследования блока атомной станции для продления срока его эксплуатации: 1 . Восстанавливаемый элемент элемент, для которого в рассматриваемой ситуации проведение… … Словарь-справочник терминов нормативно-технической документации
Фактическое состояние элементов блока АС — 10 . Фактическое состояние элементов блока АС техническое состояние элементов блока АС на момент оценки и их остаточный ресурс. Источник … Словарь-справочник терминов нормативно-технической документации
Блокировка в звеньевой структуре коммутационного поля коммутационного блока — 116 Источник: ГОСТ 19472 88: Система автоматизированной телефонной связи общегосударственная. Термины и определения … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на английский
с английского на русский- С английского на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский